
we had an overview of the different types of manoeuvres undertaken by a ship, along with their necessary trials done post-launch. We also learnt about Turning Circle; however, is knowing the turning ability of the ship in response to control sufficient to guarantee the entire manoeuvring ability of the ship?
To answer this question, we will discuss the remaining types of manoeuvres, their necessary check-trials and purpose.
Types of Ship Manoeuvres:
Zigzag Manoeuvre
This type of manoeuvre is also known as the Z-Manoeuvre or the Kempf Manoeuvre. In some situations, a ship is required to change its course or heading. Sometimes in rough seas or in cases of directional errors, the ship may be required to change its direction more rapidly within a limited span of time. So, the ability to zigzag manoeuvre should be an inherent property in the manoeuvring characteristics of a vessel. The trial for this is conducted as follows:
· The ship is steadied on a straight line course in the sea conditions described in the previous article
· Then the rudder angle is applied to a pre-defined angle of 10 degrees or 20 degrees to either port or starboard. This is termed as the ‘First Execute’
· In response to the rudder, the ship changes its yaw motion towards the applied rudder angle and gradually changes its heading
· After a certain defined angle of heading is reached (not to be confused with the rudder angle as the heading angle is purely the angle between the ship’s own centreline and the reference space coordinates of the earth; a measure of the ship’s course), the rudder angle is immediately reversed to the exactly opposite value. If the first execute rudder angle had been to port, it is reverted to starboard and vice-versa
· Consequently, the ship’s yaw rate begins to change towards the applied direction. The ship begins to change its heading once again
· Again when it approaches the steady approach in that direction, the rudder is swung in the opposite direction
· The cycle is iterated for a definite number of times

Figure 1: Zig-zag Manoeuvres of a Naval Vessel – Credits: damen.com
What are the results inferred from the above test? The main objective of conducting this trial is to check that the ship response in changing its course in effect to a given rudder angle along with the variation in Yaw rate. It is also a measure of the path stability of a ship, the more it takes time and effort to change its heading, it is said to be ‘stable by path’. Vice-versa is path changing-ability. The requirements differ from one vessel to another. In naval vessels, there may be a need of greater path-changing ability whereas, for a cargo carrier, it may be the opposite.
Some Important Terms Determined during the test:
· Initial Turning Time: the time taken to change course or heading in response to rudder execute. Time taken to change yaw in a particular direction
· Overshoot angle: This is a very crucial parameter determined using this test. Overshoot angle is defined as the excess angle of heading reached by ship in its previous direction (after rudder is applied). Most designs seek least overshoot angle as it is desirable for better controllability
· Yaw rate/turning speed in the changed direction.
· Reach: The time between the first execute to when the heading angle is zero.
Based on the permissible values of rudder angle, zigzag test can be of two types:
· 10 degree zigzag manoeuvre
· 20 degree zigzag manoeuvre
Let us now analytically delve a bit further into the analysis of zigzag manoeuvre. (Figure 2)
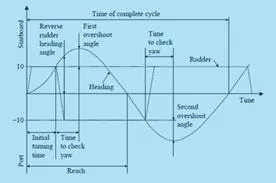
Figure 2 – Analytic of Zig Zag Manoeuvre
First, the rudder angle is applied to starboard (at 10 degrees). This alters the ship’s heading angle to starboard gradually. After a certain span of time, the rudder angle is reversed. In effect to this change, the ship’s heading angle again starts reverting to port.
This is a point where the overshoot is measured from the curve. In all practical cases, the ship does not have the ability to immediately revert to port after rudder is applied. It yields to some heading angle in its ‘set direction’ after gradually yawing to port. This excess the angle of heading it attains before reverting again is a measure of the Overshoot angle.
The peak of the curve that is where the heading changes its “tendency” in response to the rudder angle. On similar lines, going through the time axis, the time taken to change its heading at each course in response to rudder action is also a measure of the manoeuvring efficiency of the ship. This is given as the ‘Time taken to check Yaw’. After crossing the zero line, it approaches towards the negative heading angle (to port, in this case).
Again after some time, the rudder is reversed to starboard. The ship reverts to starboard again after undergoing a certain overshoot.


Comments are closed