
digital computer or combined computer), a combination unit of several electronic computers that use different (analog and digital) representations of values and operate under a single control system. In addition to analog and digital computers and a control system, a hybrid system usually includes value representation converters, intrasystem communications devices, and peripheral equipment (see Figure 1). A hybrid computer system is a complex of electronic computers; this is its principal distinction from a hybrid computer, so called because it is composed of hybrid computing elements or utilizes both analog and digital elements.
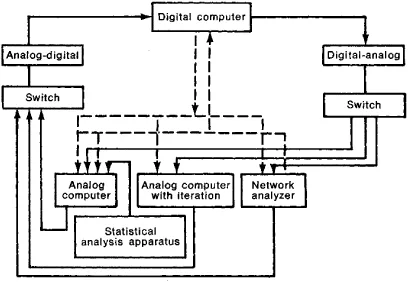
Figure 1. Block diagram of a general-purpose hybrid computer system. The solid lines indicate information channels; the dotted lines indicate control channels.
Analog computers equipped with memories and having parallel logic, digital program control, and repeated use of the computer elements are often referred to in literature as hybrid computer systems. Although these types of computers contain elements used in digital computers, they retain the analog mode of value representation and all the specific features of an analog computer. The hybrid computer system emerged because the potentials of separate analog and digital computers, taken separately, proved to be inadequate when solving many new problems involving the control of moving objects, the optimization and simulation of control systems, and the development of complex training simulators.
The separation of the computational process in problem-solving into individual operations that are performed by the analog and digital computers in the complex reduces the volume of the computational operations assigned to the digital computer, so that with all other factors equal, the overall speed of operation of the hybrid system in increased.
Hybrid computer systems are classified as analog-oriented, digital-oriented, and balanced types. In the first type of system the digital computer is utilized as an auxiliary external apparatus for the analog computer to generate complex nonlinear functions, to store the results obtained, and to provide program control for the analog computer. In systems of the second type, the analog computer is utilized as an auxiliary external device for the digital computer to simulate the elements of actual apparatus and to repeatedly carry out numerous small subroutines.
The creation of efficient hybrid complexes requires above all accurate definition of the basic fields of application and a detailed analysis of typical problems in these fields. As a result, a logical hybrid structure can be set up, and the requirements for its individual parts can be formulated.
Problems that are solved efficiently on a hybrid computer system can be divided into the following groups: real-time simulation of automatic control systems that include both analog and digital devices, real-time reproduction of processes that contain high-frequency components and variables that fluctuate over a wide range, statistical simulation, simulation of biological systems, solution of equations in partial derivatives, and optimization of control systems.
The simulation of the control system of a rolling mill may serve as an example of the first group of problems. The dynamics of the mill’s processes are reproduced on the analog computer, and the special-purpose computer control is simulated on a medium-class general-purpose digital computer. As a consequence of the short duration of the transient processes in the rolling-mill drives, the full simulation of such processes in real time would require the use of superhigh-speed digital computers. Similar problems are frequently encountered in control systems for military objects.
Problems of the control of moving objects, including those of self-guidance, as well as problems that occur during the construction of the computer portions of complex simulators, are typical of the second group. A characteristic of self-guidance problems is that the trajectory of the motion is formed during the motion itself. The high speed of variation of some parameters as an object approaches its target requires fast response in the control system, exceeding the capabilities of modern digital computers, and the large dynamic range requires high accuracy, which is difficult to attain on an analog computer. When solving this problem on a hybrid computer system it is advisable to assign the reproduction of the equations of motion around the center of gravity to the analog portion and the motion of the center of gravity and the kinematic relationships to the digital portion of the system.
Problems in the third group include those that are solved by processing many realizations of a random process—for example, the solution of multidimensional equations in partial derivatives by the Monte Carlo method, the solution of stochastic programming problems, and finding the extremum of multivariable functions. The repeated realization of a random process is assigned to a high-speed analog computer operating in an iterative solution mode, and the processing of the results, the reproduction of functions at the boundaries of regions, and the calculation of functionals is done on the digital computer. In addition, the digital computer determines the computational cutoff time. The use of a hybrid computer system shortens the solution time of this type of problem by several orders of magnitude as compared with the use of a digital computer alone.
A similar effect is achieved by using a hybrid system to simulate the propagation processes of excitation in biological systems. A specific feature of this process is that even in the simplest cases it is necessary to reproduce a complex non-linear system of equations in partial derivatives.
The search for the solution of an optimal control problem for objects higher than the third order usually involves great, often insuperable difficulties. The difficulty increases if it is necessary to search for the optimal control while the system is operating. To a considerable extent hybrid computer systems help to avoid these difficulties and to utilize methods, such as Pontriagin’s maximum principle, which are complex from the computing standpoint.
The use of hybrid systems is also effective when solving nonlinear control problems in partial derivatives. They may be solved either as analysis problems or as problems of identification and optimization of objects. An example of an optimization problem would be the selection of nonlinearity in a heat-conducting material for a given temperature distribution, the determination of the geometry of aircraft in order to produce the required aerodynamic characteristics, the distribution of the thickness of the ablation layer that protects spacecraft from overheating during their entry into dense atmospheric layers, the development of optimal heating systems for aircraft to protect them against icing with the least energy consumption, and the calculation of a network of irrigation canals and determining the optimal flows in them. When solving these problems, the digital computer is connected to a network analyzer, which is used repeatedly in the process.
The development of hybrid computer systems is possible in two directions: the construction of specialized systems designed to solve only one class of problems, and the construction of general-purpose systems that are able to solve a relatively broad class of problems. The structure of such a general-purpose hybrid complex (see Figure 1) consists of a single-run analog computer, an analog computer with an iterative solution mode, a network analyzer, apparatus for communications among the computers, special equipment for solving statistical simulation problems, and peripheral equipment. In addition to the standard software of the electronic computers in the complex, hybrid systems require special programs to serve the system for communications among the computers and to automate the processes of preparing and formulating problems for the analog computer, as well as a common programming language for the complex as a whole.
In addition to the new computational potential of hybrid computer systems, certain characteristics appear (particularly errors) that are not present when the electronic computers are operating separately. The primary sources of error are the time delays in analog-digital converters, digital computers, and digital-analog converters; the round-off error in analog-digital and digital-analog converters; the nonsimultaneous readout error for analog signals on analog-digital converters and for digital signals on digital-analog converters; and errors associated with the discrete nature of the readout of results from digital computers. When an electronic computer is operated independently with converters, the time delay does not produce errors, but in a hybrid system it can not only cause substantial errors but may impair the efficiency of the whole system.
An analysis of a hybrid computer system’s errors is important both in the solution of a certain class of problems and in the development of methods to increase the system’s accuracy and efficiency. The primary errors of the independently operated analog and digital computers in a hybrid complex have been thoroughly examined, but the evaluation of errors when solving nonlinear problems with a hybrid complex is a matter that has not yet been solved.

